Añadir a mis favoritos
Ver traducción automática
Esta es una traducción automática. Para ver el texto original en inglés
haga clic aquí
#Tendencias de productos
{{{sourceTextContent.title}}}
L25 USV Realizar la cartografía multihaz al puente Hong Kong-Zhuhai-Macao
{{{sourceTextContent.subTitle}}}
El USV marino OceanAlpha L25 fue equipado con una sonda multihaz Teledyne RESON T50-P para la elaboración de mapas de seguimiento de líneas.
{{{sourceTextContent.description}}}
El puente Hong Kong-Zhuhai-Macao es el más largo del mundo. Su sección marítima es de 42 kilómetros, y el túnel submarino es de 35.578 kilómetros de largo. La inspección y el mantenimiento a largo plazo del puente son difíciles y peligrosos si se basan únicamente en la operación manual. La adopción de tecnología autónoma no tripulada puede mejorar enormemente la eficiencia y garantizar la seguridad del personal.
Proceso de mapeo
De acuerdo con el requerimiento del cliente, la tarea de mapeo del terreno submarino se llevó a cabo en un área de agua de 500 metros × 200 metros por encima del túnel de tubo sumergido en el extremo del puente de Zhuhai, y otra tarea se realizó en el área de agua a menos de 100 metros de la Isla Artificial del Oeste. El USV marino OceanAlpha L25 fue equipado con una sonda multihaz Teledyne RESON T50-P para la elaboración de mapas de seguimiento de líneas.
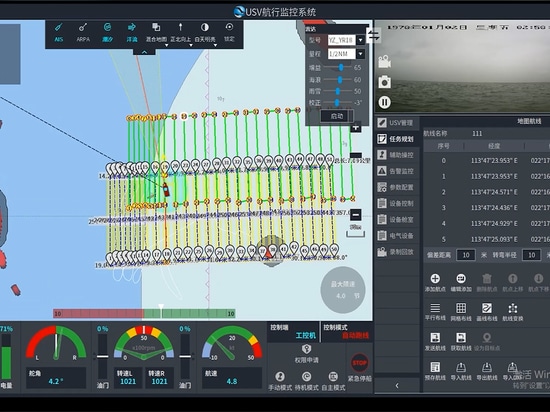
El USV L25 llegó al área de operaciones después de 20 kilómetros de navegación autónoma. Los técnicos colocaron las líneas de puntos de ruta de acuerdo con las "Especificaciones del estudio marino GBT 12763.10-2007": Topografía submarina y levantamiento topográfico" y "Especificación de levantamiento hidrográfico GB 12327-1998".
Las principales líneas de puntos de ruta se establecieron de acuerdo con la dirección general del área objetivo. La superposición de los barridos adyacentes no es inferior al 10% de la anchura del barrido, y la línea de waypoint de contacto no es inferior al 5% de la longitud total de la línea principal. Al escanear las dos áreas submarinas, L25 USV obtuvo los datos de las nubes de puntos de los terrenos submarinos, lo que proporciona un apoyo de datos para el diagnóstico de la sedimentación y deformación de la estructura y el encenagamiento posterior.
Conclusión
La aplicación de tecnología no tripulada puede mejorar eficazmente la eficiencia operacional y reducir los riesgos para la seguridad del personal. Los usuarios pueden ahorrar tareas de vigilancia periódica en el sistema para que el USV pueda controlar inteligentemente su navegación basándose en información de posición y velocidad de alta precisión, realizando así tareas de vigilancia altamente repetitivas. En este modo, los datos históricos periódicos formados por el uso del mismo conjunto de equipos y la misma trayectoria cartográfica son más fiables, continuos, fáciles de comparar y trazables que las operaciones tradicionales tripuladas.